
Table of contents
Connected and automated vehicles (CAVs) are transforming the automotive industry, promising safer roads, improved energy efficiency, and reduced congestion. But testing these technologies is complex. Real-world trials are costly and limited, while pure simulation often lacks the realism needed for robust validation.
That’s where Real-Sim CAV simulation with PTV Vissim comes in – a flexible, open-source framework that combines high-fidelity traffic simulation with real hardware integration. This approach enables automotive engineers and researchers to evaluate CAV applications in realistic, scalable environments without leaving the lab.
Why Real-Sim for CAV testing?
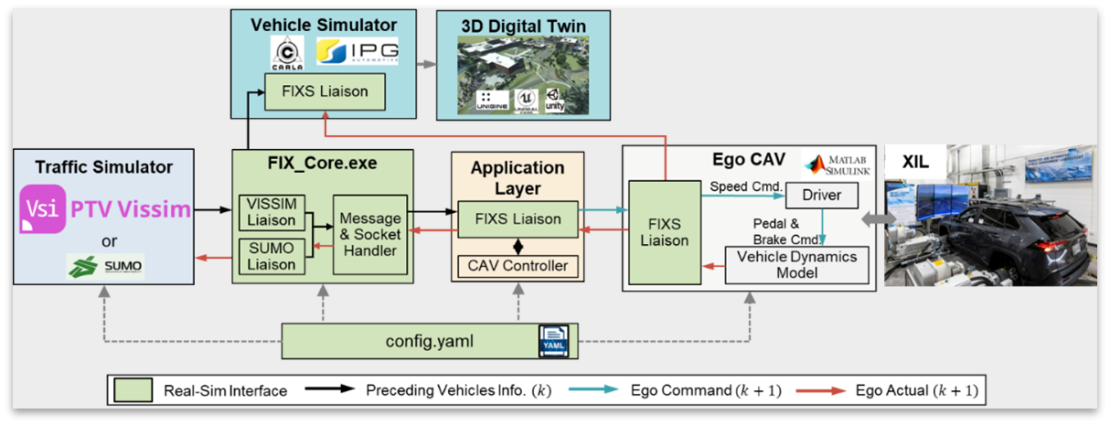
CAV development spans multiple domains: sensing, localization, perception, communication, motion planning, control, and vehicle dynamics. Integrating these into a single testable environment is challenging. Real-Sim, developed under the leadership of Oak Ridge National Laboratory (ORNL), addresses this by providing an anything-in-the-loop (XIL) simulation framework that connects diverse tools and hardware seamlessly.
Unlike traditional setups that require custom APIs for each integration, Real-Sim uses a standardized communication layer called the Flexible Interface for XIL Simulation (FIXS). FIXS ensures that once you connect your controller or algorithm, you can switch between simulation platforms or configurations without rewriting code. This flexibility is critical for teams working across different software ecosystems and programming languages.
How Real-Sim Works with PTV Vissim
PTV Vissim is the backbone of traffic simulation in this setup. Its microscopic modeling capabilities allow you to replicate complex traffic scenarios with high fidelity, including:
- Detailed road networks and geometries using ASAM OpenDRIVE for interoperability.
- Signal control logic for urban intersections and adaptive systems.
- Driver behavior models for realistic traffic flow and mixed traffic conditions.
When integrated with Real-Sim, PTV Vissim communicates through FIXS using TCP/IP. This enables:
- Real-time interaction between traffic simulation and external controllers.
- Minimal latency for smooth co-simulation, even in distributed environments.
- Scalable execution, so components can run on the same machine or across multiple systems without performance loss.
This tight coupling means you can move from software-in-the-loop (SIL) to hardware-in-the-loop (HIL) testing without changing your control scripts. FIXS handles synchronization behind the scenes, making the process truly plug-and-play.
Key Components of Real-Sim
FIXS: The communication hub that connects simulation tools and hardware, standardizing message types for vehicle status (such as position, speed, acceleration, lane ID), traffic signal states, and detector information for signal controls.
Real-Twin: A scenario creation and calibration tool that ensures simulation outputs reflect real-world conditions. It streamlines the process of building realistic traffic environments and calibrating them against observed data.
Application-agnostic design: Supports CAV algorithms for energy efficiency, safety, and control strategies without platform lock-in. Whether your code is in Python, MATLAB/Simulink, or C++, integration is seamless.
Example Application: EcoPilot for Energy Savings
The University of Georgia (UGA) demonstrated Real-Sim in action by testing an EcoPilot controller designed for eco-approach and departure at signalized intersections1 .
The setup included:
- Traffic environment: Simulated in PTV Vissim with realistic traffic demand and signal timing.
- Vehicle-in-the-loop: A real car mounted on a steerable chassis dynamometer connected to each wheel.
- Dynamic resistance: Controlled via dSPACE to replicate real road conditions and gradients.
This configuration preserved actual vehicle dynamics and powertrain behavior while evaluating energy-efficient strategies in a virtual traffic environment. With PTV Vissim providing the traffic backbone and FIXS ensuring seamless communication, the team achieved realistic, repeatable testing without leaving the lab.
Why This Matters for Vissim Users
If you’re already using PTV Vissim, Real-Sim takes your simulations to the next level:
- Integrate real hardware into your traffic models for HIL testing.
- Evaluate CAV algorithms in realistic, multi-resolution environments.
- Accelerate development cycles by switching between simulation and physical testing without rewriting code.
- Ensure interoperability with open standards like ASAM OpenDRIVE for scenario exchange.
In short, Real-Sim turns your Vissim models into a powerful platform for full-scale CAV testing – bridging the gap between virtual and real-world validation.
Conclusion
Evaluating CAV technologies remains a fast-moving and complex research challenge. The University of Georgia shows how to use the Real-Sim framework to create a flexible, multi-resolution platform that integrates various simulation tools, control algorithms, and real hardware.
The platform includes FIXS for interfacing different components and Real-Twin for scenario creation and calibration. As an open-source project led by ORNL, the project team welcomes users and contributors from academia, research institutions, and industry partners.
Due to the complexity of CAV applications, supporting high-fidelity simulation across key components, such as traffic flow, vehicle dynamics, sensing, and control, is essential. Real-Sim addresses this need while ensuring flexibility regardless of programming language. Users only need to connect to FIXS once.
Afterwards, they can switch between simulation platforms or configurations without changing the API in the control scripts. FIXS handles the rest behind the scenes.
Acknowledgment
This work used ORNL’s open-source Real-Sim framework, which includes the FIXS interface and the Real-Twin scenario creation tool. Experiments were conducted in ORNL’s Connected and Automated Vehicle Environment (CAVE) Lab. The U.S. Department of Energy’s Vehicle Technologies Office supported all these resources and this work under the Energy Efficient Mobility Systems (EEMS) program.
Ready to Take the Next Step?
Discover how PTV Vissim supports automotive testing and advanced traffic simulation
Ready to Take the Next Step?
Discover how PTV Vissim supports automotive testing and advanced traffic simulation
- Yuan, J., LaClair, T., Wang, C.R., Li, W., Shao, Y., Kadav, P., Xu, H., Berres, A. and Ekti, A.R., Enhancing Electric Vehicle Efficiency at Intersections Via Connectivity: A Roadmanship-Aware Eco-Driving Strategy. Available at SSRN 4773153. ↩︎


