Autonomous vehicles (AVs) are transforming the future of transportation, but ensuring their safety and reliability is a significant challenge. At the Institute of Vehicle Engineering (iVH) in Seoul, South Korea, a leader in AV research, we have found innovative ways to test these vehicles using PTV Vissim.
Our team uses the microsimulation software and its add-ons, the API and Dynamic Sensor Interface (DSI) modules, to create realistic test environments for AVs.
Building the Virtual World
The journey to develop safe autonomous vehicles starts with rigorous testing. Traditional methods, like driving AVs on public roads, have limitations. They can’t always replicate every possible driving scenario an AV might encounter. This is where iVH’s digital twin virtual drive environment comes into play. Using PTV Vissim, we created a virtual world that mirrors real-world driving conditions, allowing for comprehensive testing of AV systems.
Creating Realistic Road Networks: The first step in building a virtual testing environment is modeling the road networks. Using PTV Vissim and ASAM OpenDRIVE standards, we designed detailed road layouts that include everything from lanes and intersections to traffic signs, signals and microscopic traffic flow. This ensures that the virtual roads closely resemble real ones.
Simulating Road Surfaces: Road surfaces are another critical factor in AV testing. ASAM OpenCRG helps model different types of road surfaces, from smooth highways to bumpy rural roads. This allows us to test how AVs handle various driving conditions, such as potholes or rough terrain.
Dynamic Traffic Scenarios: To create realistic traffic situations, we use ASAM OpenSCENARIO to simulate dynamic elements like moving vehicles, pedestrians, and traffic lights. PTV Vissim’s advanced traffic modeling capabilities bring these scenarios to life, ensuring that AVs can be tested in a wide range of traffic conditions, from rush hour congestion to quiet suburban streets.
Enhancing Simulations with PTV Vissim Add-Ons
API Integration: The API module in PTV Vissim allows for seamless integration with other systems and real-time data. This means we can feed live traffic data into the simulations, making them even more realistic. It also allows for customization of the simulation environment to meet specific testing needs. This integration is crucial for customizing simulations and ensuring that specific parameters and conditions relevant to autonomous driving can be accurately modeled.
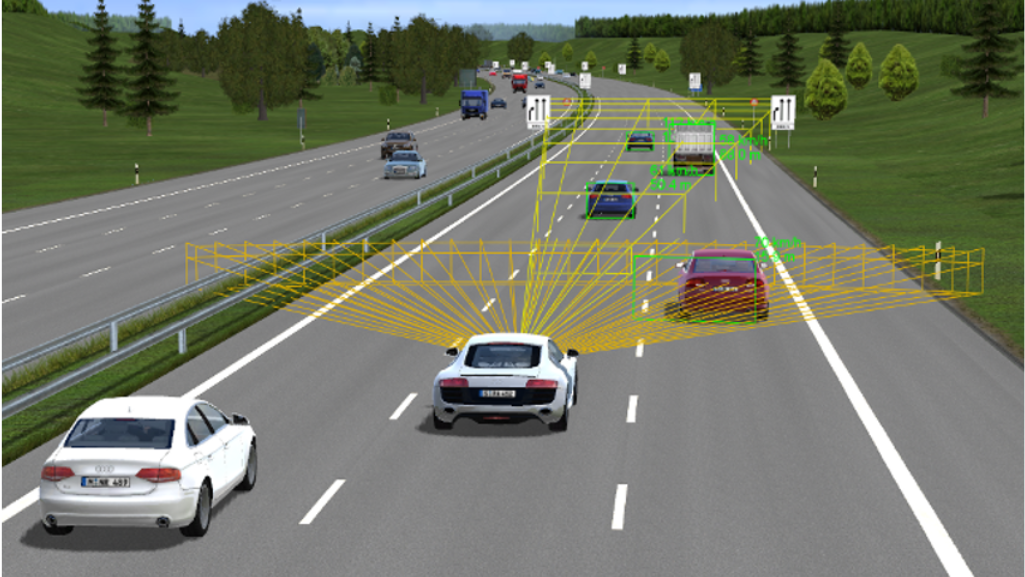
Advanced Sensor Testing with the DSI Module: The DSI module enables the integration of various sensors into the simulation. AVs rely on sensors like lidar and cameras to navigate and make decisions. By modeling these sensors in the virtual environment, we can test how the AVs respond to real-world inputs, such as detecting obstacles or reading traffic signs. This feature is particularly useful for developing and testing Advanced Driver Assistance Systems (ADAS) and full autonomy. Using the DSI module, it is possible to assess how AV systems respond to the presence of human drivers, ensuring reliable and safe performance.
Real-World Application: Testing Autonomous BRT Systems
One of the significant applications of this technology is testing autonomous Bus Rapid Transit (BRT) systems. We have developed a virtual environment that mirrors the BRT route at the Cheongna International City Station, Incheon, complete with all the necessary road and traffic details. This allows for extensive testing of the BRT’s autonomous driving capabilities, including how it handles switching control between human drivers and the autonomous system.
Simulating Real Traffic Conditions: Using PTV Vissim, we created microscopic traffic simulations that replicate real traffic flows around the BRT. This helps in evaluating the system’s performance in real-time traffic, ensuring it can safely navigate through busy streets.
Control System Evaluation: Building a mock-up identical to the actual BRT to evaluate control right switching and autonomous driving logic in the virtual environment.
Sensor Integration and Data Sharing: Various sensors, including advanced lidar systems, are modeled and integrated into the simulation. These sensors collect data that is then shared with the AV’s control system. This process helps in fine-tuning the sensors’ performance and ensuring the AV can accurately perceive and react to its environment.
The integration of Vissim with the virtual driving environment enabled extensive testing and validation of AV systems. The simulated environment provided a safe and controlled setting for evaluating systems without the risks associated with real-world testing. This approach not only enhanced the safety of the testing process but also significantly reduced the time and cost involved in AV development.
Overcoming Challenges and Looking Ahead
The development of a digital twin for AV testing is not without challenges. Creating an accurate and realistic virtual environment requires meticulous attention to detail and extensive testing. However, the benefits are immense. Our approach significantly reduces the risks and costs associated with real-world testing, accelerates the development process, and ensures that AVs are thoroughly tested before hitting the road.
The innovative use of PTV Vissim and its add-ons showcases the power of advanced simulation technologies in the development of autonomous vehicles. By creating a detailed and realistic virtual testing environment, we are able to pave the way for safer and more reliable AV systems. The integration of real-time data and sensor modeling ensures that these vehicles can handle the complexities of real-world driving, ultimately contributing to the broader adoption of autonomous driving technology.
Related Products
Related Posts


