

Table of contents
The development of autonomous vehicles and smart mobility solutions demands highly precise, flexible and open simulation environments.
At the FZI Research Center for Information Technology we’ve developed an open simulation environment by creating a digital twin of our autonomous driving test area. The virtual platform allows to test a wide range of technologies in a controlled and scalable way. Our goal is to explore innovative mobility concepts, unlock new potential, and ensure their safety and reliability through intelligent systems.
Our digital twin replicates the Test Area for Autonomous Driving in Baden-Württemberg (TAF-BW) and is part of the “AI in Mobility” service contract commissioned by the German Ministry of Transport Baden-Württemberg. We developed this virtual environment to support research and innovation in autonomous mobility—and have made it available to the community as an open-source resource.

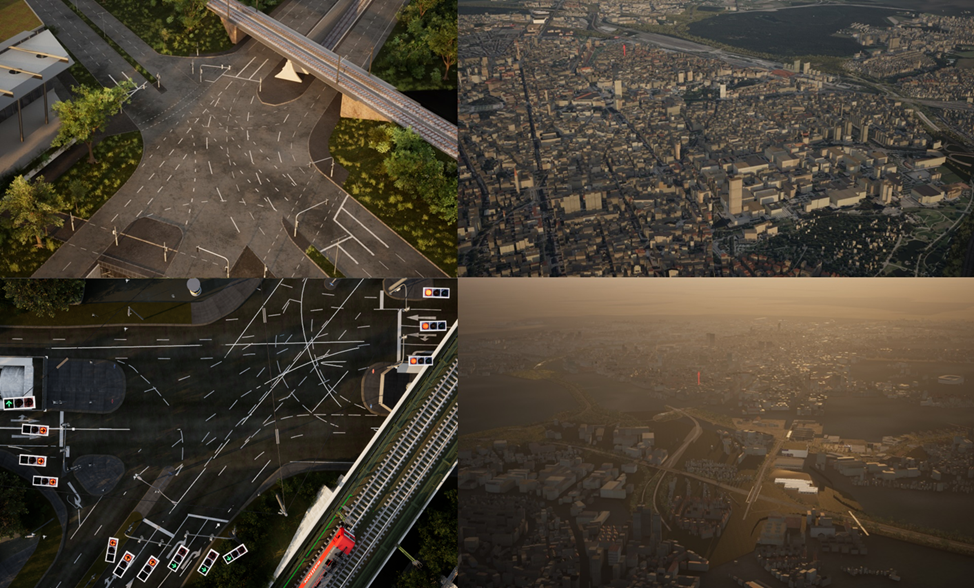
The simulation, built on Unreal Engine 5, accurately depicts 12 kilometres of real road infrastructure around the City of Karlsruhe, Germany. It includes key inner-city traffic junctions, rural roads, tunnels and the A5 freeway. The standout feature is not only the high level of graphic fidelity, but also in the seamless integration with other simulation systems, such as PTV Vissim for advanced traffic control and analysis
Realistic test environment in 3D – from Weather to Traffic Flow
The digital twin provides realistic 3D scenarios, featuring physically calculated lighting and weather effects. Road markings, signage, vegetation and building façades are generated using photogrammetric reconstruction methods and open geodata. User can dynamically adjust the traffic density, time of day, season and weather conditions can be dynamically adjusted including fog, rain and wet road surfaces, via an intuitive interface.
All models, assets, and plug-ins are released under an open-source license and are freely available to the community.
Traffic behaviour with PTV Vissim: The Digital Twin as a Control Centre
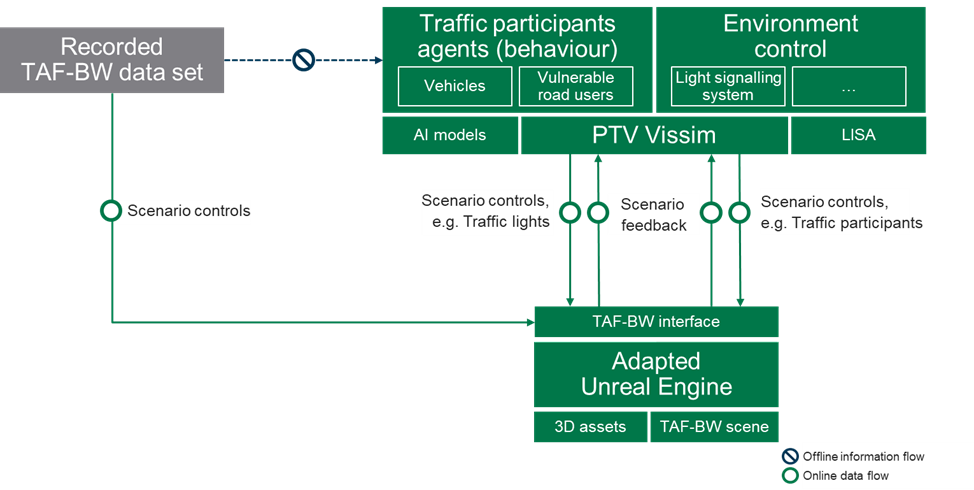
The true strength of our digital twin lies in its ability to integrate external simulations. Tools such as PTV Vissim can be seamlessly connected, enabling a realistic view of the complex traffic environment
The integration is achieved via raw UDP/TCP sockets or the ROS middleware, allowing to couple with external simulators. Data is based on the open TAF-BW file format. Dedicated adapters translate data semantically and in terms of format for different simulators (e.g., OSI). During simulation, the digital twin serves three key functions:
- Collection, distribution and visualization of ground truth data for all road users and infrastructure objects.
- Aggregation of state changes and feedback to the connected simulations.
- Synchronization of the entire simulation network.
External simulators like PTV Vissim, can control the simulation via this standardized interface, e.g. update the driving state of each vehicle as well as get updates on the current state of the environment.
The integration of Unreal Engine 5’s visual and physical representation with PTV Vissim’s advanced traffic analysis and optimization capabilities enables a wide range of use cases, from evaluating the efficiency of traffic signals to predicting road user behavior.
From Traffic Flow Analysis to AI-supported Traffic Signal Control
One evaluated use case involves the simulation and optimisation of traffic light systems. By linking PTV Vissim with the traffic light control system LISA , existing control programs can be adopted, tested, and improved. Real-world traffic flows as well as camera-based perception or induction loop data can be incorporated.
Thanks to the co-simulation interface, any modifications to the traffic light control logic are immediately reflected and visualized within the digital twin, allowing users to directly assess their impact. The aim is to improve both the efficiency and safety for all road users, with special focus on the vulnerable road users (VRUs), for example by using AI-based perception and traffic light control.
Record, Analyze and Re-Simulate Scenarios
With the TAF-BW-Player, traffic scenarios can not only be recorded within the digital twin and real, recorded scenarios also be replayed. By slightly adjusting the recorded parameters, various test scenarios can be easily generated. This enables:
- Testing new control strategies und reproducible conditions
- Generation of synthetic training data for AI models
- Analysis of behavior patterns in complex traffic situations
Open Source as a Catalyst for Intelligent Mobility
The TAF-BW open-source digital twin offers a powerful, flexible and expandable platform for research, industry and interested alike. Coupling it with simulation tools such as PTV Vissim enables a holistic view of mobility – from virtual visualization to traffic analysis and optimization. Through this approach, we are contributing to the development of safe, efficient and sustainable transportation systems in an open, collaborative and practical way.
Discover PTV Vissim Automotive
The microscopic traffic simulation PTV Vissim has proven itself for many years as a development tool in automotive engineering
Boost your PTV Vissim Automotive skills at your own pace.
Master PTV Vissim Automotive with step-by-step tutorials. Learn to model traffic,
analyze vehicle dynamics, and optimize mobility solutions easily.
Related Posts


