Table of contents
Parking robots offer significant potential to increase parking capacity, enhance operational efficiency, and reduce the risk of vehicle damage. However, they are not a plug-and-play solution. Before a single system is installed, simulations can help to validate operations. At TOMM’s Korea we used microsimulation in PTV Vissim to test not only what happens inside a parking facility, but also how queues and spillback affect the surrounding street network. With the right approach, hardware choices such as robot fleet size and handover bays can be translated into measurable performance targets. Just as importantly, user experience can be designed and optimized through vehicle calling logic, from kiosks today to app-based pre-booked in the future..
What is a Parking Robot?

A parking robot changes just one step in the parking process, but that change reshapes the entire system. Instead of navigating ramps and searching for a stall, the driver stops at a designated transfer zone. From that point on, the robot takes control, couples with the vehicle, and transfers it to a parking stall. Retrieval follows the same logic in reverse.
This shift turns parking into a service system. Performance is no longer determined by how drivers behave, but by how efficiently the system operates. Robot throughput, handover bay capacity, and dispatch rules become the dominant factors.
Compared with conventional self-parking, the advantages are immediate. Internal circulation is reduced, unnecessary search driving disappears, and conflicts inside parking aisles are minimized. In constrained sites, robot-assisted parking can also unlock additional usable capacity through double-stacked configurations. More importantly, operations become controllable. Bay allocation, calling rules, and service logic can all be tuned to meet specific performance goals.
Why simulate first—and why PTV Vissim?
Parking robots rarely fail because robots cannot move vehicles. They fail when queues grow faster than the system can serve them, causing delays to cascade and spill back into the street network. That risk cannot be identified after construction. It must be tested beforehand.
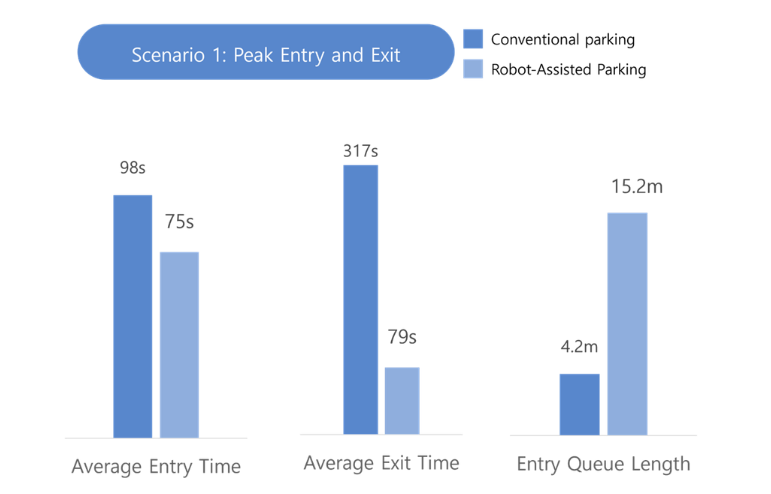
In scenario 1 (baseline), robot-assisted parking showed clear benefits. Average entry time was reduced by 23 seconds, while average exit time dropped by 238 seconds. These are meaningful gains. At the same time, the simulation revealed a classic service-system limitation. When arrivals exceeded operating capacity, entry queues increased, reaching up to 11 meters.
This is why a microsimulation tool is essential. Evaluating only the parking facility is not enough. The full chain must be tested, from the access road and gate to the handover bays, internal transfer paths, and eventual exit. PTV Vissim enables exactly this kind of integrated analysis by modeling parking facilities and surrounding traffic within a single environment. Its parking-lot objects and routing logic make it possible to evaluate internal operations alongside external traffic impacts in one coherent model.
How to Build a Robot-Assisted Parking Simulation in PTV Vissim
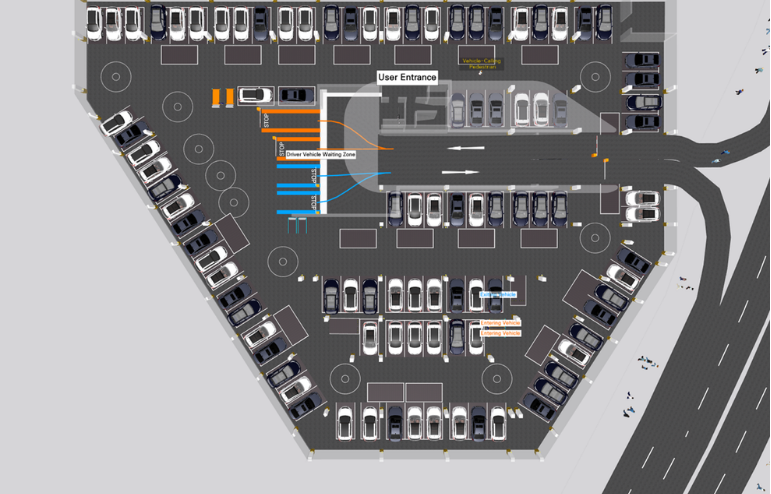
The key to effective simulation is to stay practical and decision-focused. The first step is defining the right boundary. This includes not only the parking facility itself, but also the upstream access point where queue spillback would become a public issue. In the Yongsan case, internal parking operations were explicitly linked to the external road network through access gates.
Modeling a credible conventional parking baseline is equally important. Without it, there is no reference for comparison. The case study represented conventional parking by assigning vehicles to stalls closest to the entry first, reflecting realistic driver behavior. Then, the robot-assisted parking option was implemented as a service process. Transfer zones were modeled explicitly, with defined service times, waiting constraints, and robot availability. This step is where robot technology becomes system performance.
To support decision-making, the simulation focused on KPIs that matter to stakeholders. Entry and exit times were measured over defined periods, along with maximum queue length at critical points. Finally, operating rules such as bay allocation, overflow handling, and calling logic were treated as design inputs rather than afterthoughts. These rules ultimately define system stability.
Case Study: Yongsan IBD Parking Facility — Setup and Key Results
With limited land and high traffic demand, Yongsan IBD, a mega-scale urban development project envisioned as Seoul’s future global business and smart city hub, offered the perfect real-world environment to test whether robotic parking could outperform conventional systems.
This evaluation was conducted for a parking facility near the Cultural Park–C1 area within the Yongsan IBD context. Two parking concepts were assessed under the same demand conditions. The conventional self-parking configuration provided a total of 107 stalls, consisting of 103 general spaces and 4 accessible spaces. In contrast, the robot-assisted parking option increased usable capacity to 122 stalls by introducing 19 double-stacked parking spaces while maintaining the same number of general stalls.
To ensure a fair comparison, baseline demand was defined as 103 vehicles arriving over a two-hour period, representing the time required to reach full occupancy under the selected assumptions. The robot-assisted system was configured with four robot sets and four handover bays, which could be flexibly reallocated depending on the operating mode and demand pattern.
Key Results

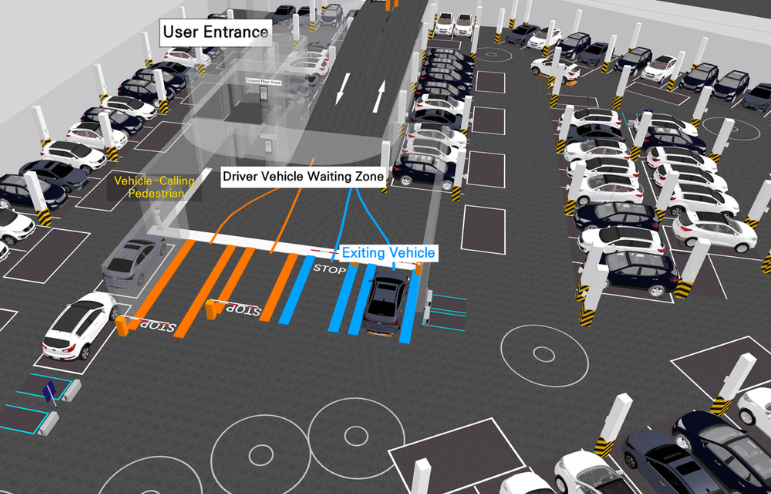
The simulation results show that robot-assisted parking delivers real time savings, with faster entry and exit operations. However, speed alone is not enough. When demand exceeds system capacity, queues still grow, making operational design critical. In the Yongsan IDB case, explicit overflow strategies reduced queue spillback by 72.1 meters, protecting the surrounding street network, while flexible bay allocation helped maintain stable performance under higher demand. On the user side, vehicle calling further improved efficiency, reducing total retrieval time by 27 seconds, with additional gains possible through app-based pre-booked strategies.
Taken together, the results point to four practical lessons for planners and operators:
- Speed helps, but capacity decides.
Robot-assisted parking is faster, but throughput and system sizing ultimately determine performance. - Overflow logic protects the city.
Managing excess demand inside the facility prevents queues from reaching public roads. - Operations tuning creates stability.
Flexible bay allocation keeps performance consistent under changing demand. - User experience can be designed.
Vehicle calling reduces friction and retrieval time, especially when combined with pre-booked options.
Parking robots are not a gadget. They are a throughput system, and throughput systems must be validated. From our experience we can recommend to design the operation first, then finalize the hardware. Simulations makes parking-robot systems measurable, defensible, and easier to approve, not only for parking, but for the next generation of urban mobility solutions.
Realistic Multimodal Performance
Simulate all modes of transport and their interactions in one simulation.
Increase the efficiency of your traffic performance
PTV Vissim enables you to design, validate, and optimize traffic operations under real-world conditions before implementation.
Related Posts


