

Table of contents
Walking remains one of the most critical yet under-analysed transport modes in Nepal’s capital, Kathmandu. With pedestrians accounting for around 40% of all travel and average walking trips measuring just 3 km, the role of safe, efficient pedestrian facilities is undeniable. However, the city’s infrastructure often falls short, particularly at crossings where pedestrians interact with vehicle flows.
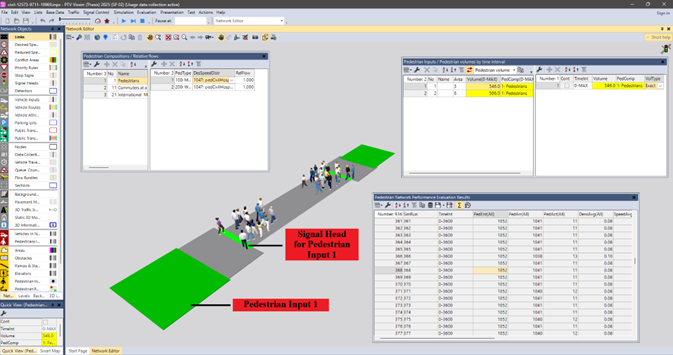
While microscopic simulation tools like PTV Vissim have seen extensive use for vehicle modelling in Nepal, their application to pedestrian movement has been minimal. This gap is partly due to the complexity of pedestrian dynamics and a lack of locally calibrated parameters. I have addressed this challenge, by introducing a robust, data-driven calibration process to significantly improve simulation accuracy.
The following article is based on my Master Thesis work Calibration of VISSIM Social Force Model Parameters: Case Studies on Signalised Pedestrian Crossings at Min Bhawan and Pulchowk.
Why Calibrate the Social Force Model?
At the heart of Vissim’s pedestrian simulation lies the Social Force Model (SFM), which represents walking behaviour through “social forces” – attractive forces towards a destination and repulsive forces from other pedestrians and obstacles. While the default parameters in Vissim are designed for generic global conditions, they often fail to reflect site-specific behaviours, especially in high-density, culturally distinct environments like Kathmandu.
Watch the webinar on this topic:

Default parameters, for instance, may overestimate the personal space pedestrians maintain, or underestimate their urgency in crossing during green phases. In signalised crossings with constrained widths, these discrepancies can distort both operational assessments and design recommendations.

Methodology: Genetic algorithms meet Vissim
The study targeted two busy signalised crossings:
- Min Bhawan (New Baneshwor, Kathmandu) – 14.3 m crossing length, 4.0 m width, and high pedestrian throughput.
- Pulchowk (Lalitpur) – 18 m crossing length, with more irregular entry/exit patterns due to site geometry.
Pedestrian crossing speeds were captured through one-hour videographic surveys during peak periods, with meticulous quality control to exclude non-standard movements.
Seven SFM parameters were selected for calibration due to their theoretical influence on speed:
- Tau (reaction time/inertia)
- ASocIso, BSocIso (isotropic repulsive forces)
- Lambda (anisotropy in perception)
- ASocMean, BSocMean (mean repulsive forces)
- VD (lateral evasion)
Using Python to control Vissim’s COM interface, a Genetic Algorithm (GA) iteratively adjusted these parameters. Fitness was defined as the inverse of the Root Mean Square Percentage Error (RMSPE) between simulated and observed crossing speed distributions. By running multiple seeds, the process avoided overfitting to a single simulation instance.
Vissim callibearation: Key Results
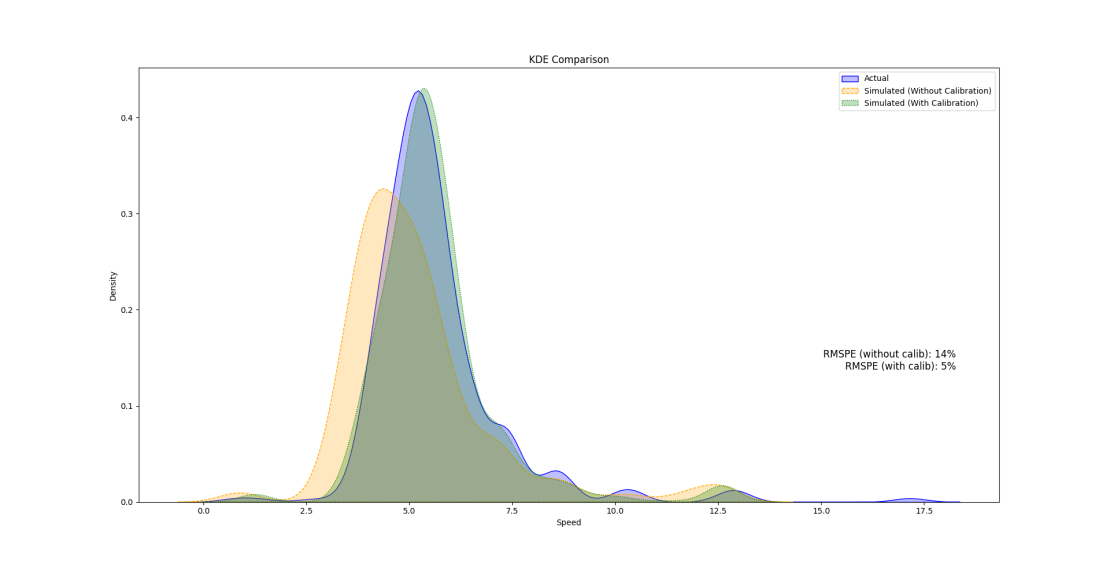
At Min Bhawan, the default parameters produced an RMSPE of 14.29%, with simulated speeds averaging 5.17 km/h versus an observed 5.64 km/h. After calibration, RMSPE dropped as low as 4.72%, with improved alignment across the entire speed distribution.
The recommended calibrated parameters for Kathmandu’s signalised crossings are:
| Parameter | Default | Recommended |
| Tau | 0.40 | 0.25 |
| ASocIso | 2.72 | 0.00 |
| BSocIso | 0.20 | 0.11 |
| Lambda | 0.176 | 0.50 |
| ASocMean | 0.40 | 0.40 |
| BSocMean | 2.80 | 0.01 |
| VD | 3.00 | 4.00 |
These values reflect faster acceleration (lower Tau), reduced repulsive forces (lower ASocIso, BSocIso, BSocMean), and greater forward focus (higher Lambda) – all consistent with observed pedestrian behaviour at crossings where urgency overrides spacing preferences.
At Pulchowk, the calibration was less dramatic, with RMSPE falling from 17.84% to around 6.8%. Lower pedestrian volumes meant fewer interactions, reducing the sensitivity of speeds to parameter adjustments.
Validation and Transferability
Independent evening-peak datasets were used for validation, confirming that calibrated parameters consistently outperformed defaults. For Min Bhawan, validation RMSPE values for calibrated models were around 6%, compared to 12.5% for the default. Pulchowk saw a similar improvement.
While the parameters were optimised for four-lane signalised crossings with average speeds near 1.6 m/s, their theoretical basis suggests transferability to similar facilities in Kathmandu and potentially other South Asian cities with comparable pedestrian cultures.
Implications for Practitioners
For transport planners and engineers using Vissim:
- Accuracy gains matter – Even modest RMSPE reductions can significantly improve the reliability of design assessments, particularly when evaluating signal timings or pedestrian safety measures.
- Context-specific calibration is essential – Default SFM settings may misrepresent pedestrian urgency, spacing, and interaction patterns in local contexts.
- Automated methods save time – Genetic algorithms, once set up, explore the parameter space far more efficiently than manual trial-and-error.
Future Directions
My thesis recommends expanding calibration to:
- Unsignalised crossings and shared spaces, where pedestrian-vehicle interactions are critical.
- Heterogeneous populations, accounting for children, elderly pedestrians, and group walking.
- Additional performance metrics, such as waiting times and acceleration profiles, to capture behavioural nuances beyond speed.
- Integrated multimodal models, allowing joint optimisation of pedestrian and vehicle parameters for holistic traffic management.
Conclusion
By harnessing genetic algorithms to calibrate Vissim’s Social Force Model for Kathmandu’s signalised crossings, this research delivers a robust, validated parameter set that dramatically improves simulation accuracy. For a city where pedestrian safety and efficiency are pressing concerns, such advancements are more than academic – they are vital tools for better urban mobility planning.
Spotlight Talk
on the topic
Take a look at the case studies on signalized pedestrian crossings – directly explained by our experts
Spotlight Talk on the topic
Take a look at the case studies on signalized pedestrian crossings – directly explained by our experts


