Table of contents
- PTV Vissim simulation levels
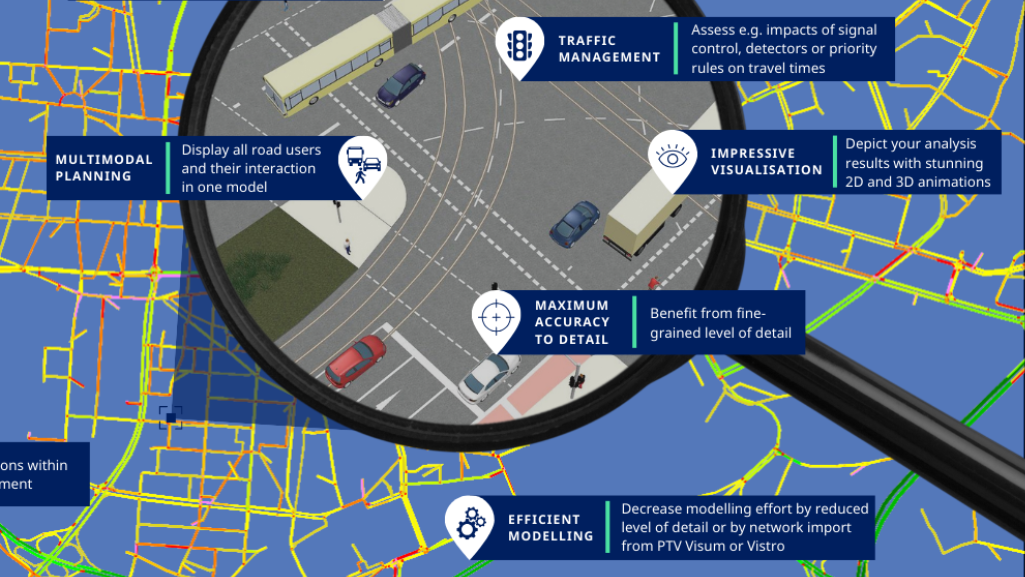
- Use cases of Vissim mesoscopic simulations
- Creating an abstract network model in Vissim – watch from 07:19
- Principles of Vissim mesoscopic simulation
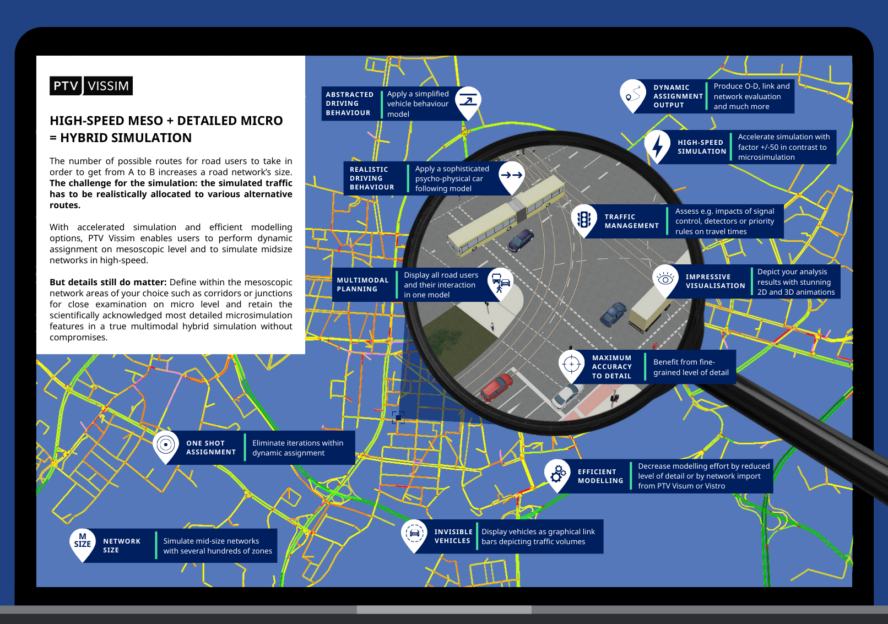
- The Vissim hybrid simulation
- Comparing simulations: micro, meso, and hybrid
- Demonstration of Vissim hybrid simulation
- Limitations of mesoscopic simulations
PTV Vissim software allows you to model traffic at different levels of detail. While the most common level of modeling is the microscopic level, this article will show you how to build good traffic models in Vissim using the mesoscopic and hybrid (a combination of micro and meso) levels.
Traffic modelers are also familiar with the macroscopic level, which is often used with PTV Visum software. This article does not cover this level.
PTV Vissim simulation levels
When using PTV Vissim, you can choose between three levels of traffic simulation:
Microscopic simulation: This is the default level of modeling in Vissim. It focuses on individual vehicles and their interactions with their neighbors and other objects. Microscopic models are typically based on car-following and several sub models, e.g. for lane-changing or reaction to the signals.
Mesoscopic simulation: Between the macro and micro levels, there is a wide range of ways to model traffic. This is the mesoscopic level, whose main advantage is its computation speed based on a simplified model. Mesoscopic simulations are 30-60 times faster than microscopic simulations, depending on the use case. This is especially true for the simulation of signals and vehicles in the network.
Mesoscopic simulation is event-based. Therefore, unlike microscopic simulation, vehicle data is not updated at every time step, but only when changes occur in the network or vehicle behavior. These events can be triggered by various situations, such as a vehicle entering a node or a change in traffic signal state. The mesoscopic simulation uses a simplified car-following model based on the work of M. Mahut. The main difference to the car-following models used in microscopic simulation is that braking and accelerating are not included.
Hybrid simulation: This model combines mesoscopic and microscopic simulation. In practice, this means that you define one or more primary areas of interest where you simulate traffic microscopically, while the rest of the model simulation is based on the mesoscopic algorithm.
Use cases of Vissim mesoscopic simulations
Use Vissim’s mesoscopic simulations to model a relatively large area where traffic measures affect route choices. In other words, a simulation of “do something” scenarios where we expect drivers to deviate from their original routes. Examples include modeling corridors with modified intersection control, congestion mitigation measures, or the effects of construction zones and temporary road closures.
Another use case is supply and demand: Simulating models of changing demand over time as well as changes in supply. For example, mesoscopic simulations allow you to change different signal settings, so you can see how congestion builds and dissipates over time.
Creating an abstract network model in Vissim – watch from 07:19
The choice between micro- and mesoscopic simulation depends on your runtime requirements and the level of detail you need in your results. Mesoscopic simulation reduces your calculation effort and speeds up the simulation. However, it also means that individual vehicles can only be visualized experimentally (in Vissim diagnostic mode, using the diagnostics.exe file in the Exe subfolder of the installation); and that simulated vehicles behave differently at intersections compared to the microscopic simulation.
It can be argued that the above simulations can be done microscopically. However, a mesoscopic simulation will be more useful. First, because of the size of the model – converging and evaluating a dynamic traffic assignment model can be time consuming. Second, because of the level of detail: You don’t need results for individual vehicles, just aggregated quantities over short periods of time.
The easiest way to create a large network suitable for mesoscopic simulation is to import from a macroscopic model created by Visum – via the Abstract Network Model (ANM).
Principles of Vissim mesoscopic simulation
How does a mesoscopic simulation work in Vissim? Here are the main principles:
- Network loading within dynamic assignment: Set your Vissim model for a dynamic assignment. It works like a microscopic simulation, but the vehicles move based on the mesoscopic algorithm. You can easily choose and switch between three ways to load the demand onto the network: microscopic, mesoscopic, or hybrid.
- Meso nodes creation: If you import your network from a macroscopic model created by Visum, all the nodes needed for the mesoscopic simulation will be set automatically. If you create your model in Vissim from scratch, or if you want to convert your DTA model to meso, you can easily let Vissim create the mesoscopic nodes. Do so by calling such a function from the context menu of the network editor, when the node type object is selected in the network objects window.
- Simulating individual vehicles: To simulate individual vehicles, the Vissim mesoscopic simulation uses a simplified car following model, which requires only three parameters: desired speed, standstill distance between two vehicles, and reaction time.
- Lane selection and lane changes are modeled under these policies: No lane changing on the link; No lane changing when entering a node; Lane changing when exiting a node; Lane selection by density; No use of a lane that is not linked by a connector to another downstream link lane.
- Junction control between conflicting volumes is modeled using signals and gap acceptance. Signals are modeled in the usual way: They can be fixed times with daily schedules or dynamically controlled (vehicle actuated). Gap acceptance requires you to define the conflict areas, the critical gap, the following gap, and the maximum wait time. There are special lists for setting gap acceptance parameters because these lists show only the conflicts relevant for mesoscopic simulation. Nodes also have a special attribute called “Meso-Penalty (merging vehicles)“, which can be used to calibrate the loss of capacity at the weaving section – by adding a value [s] to the minimum meso gap time between two consecutive vehicles on the same exit lane, if they come from different entry lanes or entry links.
- Mesoscopic network graph: Some evaluations are specific to mesoscopic simulations and are related to the mesoscopic network graph. Some results depend on the type of edge, e.g. for turns, you have the option to also look at the link results of the incoming link for the vehicles making the turn.
The Vissim hybrid simulation
The hybrid model in Vissim combines meso and micro simulations. In practice, this means that you define an area where you simulate traffic microscopically, while the rest of the model simulation is based on the mesoscopic algorithm.
The hybrid model is useful for studying a smaller area in more detail. For example, if you need vehicle records or specific measurements, the simulation results need to be more detailed than what a mesoscopic simulation can produce.
Other reasons for using the hybrid model may be that you have elements in the model where the mesoscopic simulation is not applicable. For example, you may have public transit priority modeled with PT telegrams, cyclists, or parts with pedestrian interactions. In such simulations, a microscopic model would be the right choice.
When building a Vissim hybrid simulation, note the following:
- The evaluation of routes through the micro-area must be consistent with the rest of the model. That’s because the evaluation is based on the dynamic traffic assignment graph generated for the entire model. General costs are also evaluated based on the corresponding simulation method.
- The introduction of microscopically simulated areas should not lead to artificial behavior. In other words, certain phenomena must be replicated across boundaries. For example, shock waves must be replicated across the boundaries between the microscopically simulated area and the other part.
Comparing simulations: micro, meso, and hybrid
For a quick comparison of the simulations, this slide shows the same model simulated in three different ways: micro, meso, and hybrid.
The individual vehicles are only visible in the microscopic and hybrid models. The color represents density: The darker the density, the more the queue moves upstream. Over the course of the simulation, the queue extends to the beginning of the network in all models.
The Vissim screen recording in this section shows how traffic is simulated in Micro, Meso & Hybrid levels.
Demonstration of Vissim hybrid simulation
Watch the video in this section, to see a step-by-step setting of a Vissim hybrid simulation (watch from 26:17).
Limitations of mesoscopic simulations
There are many new possibilities with mesoscopic simulation. But there are also some limitations, partly due to the algorithms used.
This is especially true for slow modes like bicycles and pedestrians, but also for some other elements. For example, you cannot use real parking spaces or work with priority roads. For a full list, see the online help under Functional Differences to Microscopic Simulation.
Your guide to transportation modeling
Get the most important information about transportation modeling.
Advantages of Traffic Simulation
Make your mobility projects faster and more realistic
Related Posts


